
Research focus and key technologies of automotive bus
The research and development of the automotive bus system can be divided into three stages: the first stage is to study the basic control system of the car (also known as the comfort bus system), such as lighting, electric windows, central control locks and so on. The second stage is to study the main control system of the car (also known as the power bus system), such as the EFI ECU control system, ABS system, automatic transmission and so on. The third stage is to study the comprehensive, real-time control and information feedback between the electronic control systems of the car.
This article refers to the address: http://
According to China's automotive electronics technology development plan, after entering the 21st century, the car electronic technology can reach the level of foreign countries in the 1990s. In order to shorten the gap with the technical level of foreign cars and improve their own competitiveness, relying solely on technology introduction is not conducive to development, digestion, absorption, Research and development of its own automotive bus and network applications is in line. At present, the research and application of automobile bus in China is still in its infancy, and the application trend of automobile bus is obvious. It is a good time to intervene in this research.
Research focus of automotive bus
Since China's models are mainly European and American models, and European and American models are dominated by CAN bus, most of the models that use bus technology in China use CAN bus. Therefore, the development of automotive bus should be based on the actual situation at home and abroad.
CAN conforms to the ISO/OSI reference model, but only specifies the protocol of the physical layer and the data link layer, and the protocol of the application layer needs to be defined by the user. There are many chips that support the CAN low-level protocol, both in the MCU of the chip and the off-chip CAN controller. There are many application layer protocols developed by users themselves. For example, the DEVICENET protocol defined by AB is the application layer protocol based on the CAN protocol. The SDS bus introduced by Honeywell also defines its own application layer based on CAN. It can be seen that the research focus of the automotive CAN bus is to develop the hardware and application layer software of the ECU for specific models and to form an in-vehicle network.
Key technology
To construct an in-vehicle network using the CAN bus, the key technical issues that need to be solved are:
1) Technical issues such as rate, capacity, priority level, and node capacity of the bus transmission information; 2) reliable data transmission in a high electromagnetic interference environment; 3) determination of the delay time at the maximum transmission; 4) fault tolerance technology of the network; Network monitoring and fault diagnosis;
Bus network system overview
With the improvement of the performance of automotive electronic control systems, especially the performance of controller chips and software, automotive bus network systems can not only share information, save wiring harnesses, but also provide richer software functions to enhance product value and competitiveness. To meet the needs of automotive reliability, comfort and other aspects. Bus technologies corresponding to these functions include:
Network management: The controller monitors the running status of the network through network management. Once the communication failure is found, the failure processing is taken immediately. The network-managed sleep and wake-up functions coordinate the power management of each controller, reducing battery drain when the vehicle is parked.
Diagnosis: Diagnostics can not only read the fault code, but also realize two important functions: offline configuration and detection, program download. Automated downline configuration and inspection capabilities quickly and comprehensively configure and detect controller functions (such as window zero configuration and anti-pinch detection) to ensure car quality and speed production line tempo. Through the program download function, the OEM can refresh the controller software in the 4S shop, thereby reducing the recall cost caused by software defects.
Measurement and calibration: In the development of new models, the rapid control prototype controller using measurement and calibration technology can adjust the control parameters and algorithms in real time and conveniently through computer and network system, which greatly reduces the development cycle and cost. This technology is commonly used in the development of new energy vehicles in Europe, the United States and Japan.
Foreign GM, Ford, Volkswagen, etc., as well as domestic FAW, Dongfeng, SAIC, Changan, GAC, Chery and other automakers have integrated bus technology into a universal network platform for high, medium and low models. In this way, the network system changes are reduced, the degree of software reuse is increased, and the development cost is reduced. The vehicle platform of the OEM consists of network standards, test specifications and protocol stacks (network-related embedded software). The commercial vehicle network platform complies with SAEJ1939; the vehicle platform of the passenger car has its own characteristics, but more and more OEMs adopt international standards to share supplier resources. At the same time, more and more suppliers choose to develop protocol stacks by professional companies, thereby reducing development manpower and cycle.
Bus network system development process
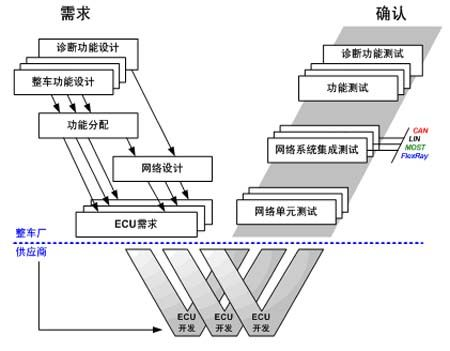
The network platform construction and network system development adopt the V-mode development process, as shown in the following figure. V mode defines a clear and effective development process: the OEM from the system requirements to the component requirements, complete the system requirements specification and component requirements specification, and release the component requirements specification to the supplier; after the supplier completes the component development, The OEM completes integration and verification on multiple rounds of prototypes and prototypes from component testing to system testing.
Bus network system topology
At present, the typical topology of a passenger car is shown in the figure below. The typical topology of a commercial vehicle is similar to that of a passenger car, but since some commercial vehicles use early technology with the latest technology, their topology has multiple gateways and the structure is relatively complicated.
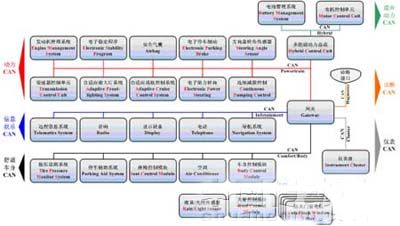
In addition, the speed of the MOST bus in 2008 has risen to 150 Mbit/s. In 2009, the BMW 7 Series car has adopted the FlexRay bus. It is foreseeable that in the near future, MOST and FlexRay will replace the current infotainment CAN network and the power CAN network.
The channel trough type Cable Tray is a fully enclosed cable support system.It is applicable for laying computer cables,communication cables,thermal couple cables and control of highly-sensitive.It works well in resisting interference of control cable shield and protecting the cables in seriously corrosive environment.
The Channel Type Fiberglass Cable Tray is made of fiberglass ,and has very good ability of anti-corrosive,light weight,and heat radiating.

Channel Type Fiberglass Cable Tray
Flexible Cable Tray,Outdoor Frp Cable Tray,Channel Shape Cable Tray,Channel Flexible Cable Support Tray
Jiangsu Loncin Electrical Equipment Co.,Ltd , https://www.loncincabletray.com