
I know the servo system design steps and methods
The servo system is a mechatronic system and should be designed using a mechatronics approach. There is no fixed answer to the servo system design, and there is no uniform way to get the answer. Different requirements of the servo system can be designed in different ways, thus obtaining a servo system with different structures. Even for the same required servo system, different designers may adopt different design methods and thus get different design solutions.
The complexity of the servo system structure determines the complexity of its design process. The design of the actual servo system is difficult to achieve once, and often it has to be repeatedly modified and debugged to obtain satisfactory results. The following is a brief introduction to the general steps and methods of servo system design.
Structure of the servo systemThe structure and type of mechatronics servo control system are numerous, but from the perspective of automatic control theory, servo control system generally includes five parts: controller, controlled object, execution link, detection link and comparison link. The following figure shows the block diagram of the servo system components.
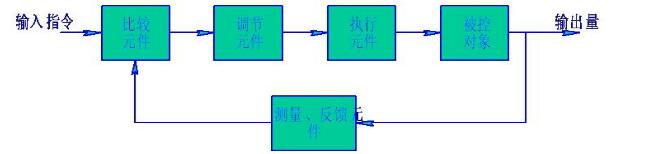
Diagram servo system composition block diagram
1, the comparison link
The comparison step is a process of comparing the input command signal with the feedback signal of the system to obtain a deviation signal between the output and the input, which is usually implemented by a special circuit or a computer. 
2, the controller
The controller is usually a computer or PID control circuit whose main task is to transform the deviation signal output by the comparison component to control the actuator to act as required.
3, the implementation link
The function of the execution link is to convert the various forms of input energy into mechanical energy according to the requirements of the control signal, and drive the controlled object to work. Actuators in mechatronic systems generally refer to various motors or hydraulic and pneumatic servos.
4. The object under control
5, testing links
The detection link refers to a device that can measure the output and convert it into the dimensions required for the comparison, and generally includes a sensor and a conversion circuit.

1, stability
The stability of the servo system refers to the system. After the disturbance signal disappears, the system can return to its original stable state, or the ability to achieve a new stable operating state under the input command signal.
Stability requirements are a basic requirement and are the most basic conditions to ensure that the servo system can operate normally. The servo system should be stable within its working range. The stability depends mainly on the structure of the system and the parameters of the components. It can be controlled by various methods provided by the automatic control theory.
2, accuracy
The accuracy of the servo system refers to the accuracy of the output of the input command signal.
The error of each component in the system will affect the accuracy of the system, such as the sensitivity and accuracy of the sensor, the zero drift and dead zone error of the servo amplifier, the backlash and transmission error in the mechanical device, and the nonlinear factors of each component. Reflected in the servo system _ will show dynamic error, steady state error and static error, the servo system should reach the given accuracy under relatively economic conditions ^
3, fast response
Fast response is the ability of the system output to quickly follow the change of the input command signal. It depends on the damping ratio and natural frequency of the system to improve the fast response, but it has an adverse effect on the stability and maximum overshoot of the system. Both systems should be optimized to make the system's output response as fast as possible.
4, sensitivity
The parameter changes of various components of the system will affect the performance of the system. The sensitivity of the system to these changes is small, that is, the performance of the system should not be affected by the parameter changes. The specific measures are: for the open loop system, each component should be selected strictly; for the closed loop system, the selection criteria for the components in the output channel can be appropriately relaxed, and the components of the feedback channel must be strictly selected to improve the sensitivity of the system.

I. Design requirements analysis, system design
Firstly, analyze the design requirements of the servo system, clarify its application and purpose, basic performance indicators and other performance indicators, and then formulate several technical solutions according to the existing technical conditions. After evaluation and comparison, select a reasonable solution. .
The design of the scheme should include the following: control mode selection; actuator selection; sensor and its detection device selection; mechanical transmission and actuator selection. The design of the scheme is the first step of the system design. The selection of each component is only preliminary, and it needs to be further revised and determined in the detailed design stage.
Second, system performance analysis
After the scheme is designed, although the specific structural parameters have not been determined, the basic performance of the scheme should be analyzed first.
First, draw a system block diagram, list the system approximate transfer function, and simplify the transfer function and block diagram (generally should be simplified to a second-order system), and then based on this, the system stability, accuracy and rapid response Analysis, the most important of which is the stability analysis. If the design requirements are not met, you should consider modifying the scheme or adding corrections.
Third, the selection of actuators and sensors
The design of the scheme is only a preliminary selection of the actuators and sensors. This step should determine the parameters and models of the actuators and sensors according to the specific speed, load and accuracy requirements.
Fourth, mechanical system design
The mechanical system design includes the design of the specific structure and parameters of the mechanical transmission mechanism and the actuator. The design should pay attention to eliminate various transmission gaps, try to improve the system stiffness, reduce the inertia and friction, especially when designing the guide rail of the actuator. Produce a "crawling" phenomenon.
Fifth, the control system design
The control system does not include the detailed design of the signal processing and amplifying circuit, the correcting device, the servo motor driving circuit, etc., and if the computer digital control is used, the design of the interface circuit and the controller algorithm software should also be included. In the design of the control system, attention should be paid to the selection of parameters of each link and the matching with the parameters of the mechanical system, so that the system has sufficient stability margin and fast response, and meets the accuracy requirements.
Sixth, system performance review
After all the structural parameters are determined, the exact transfer function of the system can be re-listed, but the actual servo system is generally a high-order system, so it should be properly simplified before performance review can be performed. After reviewing, if the performance is not ideal, you can adjust the parameters of the control system or modify the algorithm, or even redesign until you are satisfied.
Seven, system test experiment
The above design and analysis are still in the theoretical stage, and the performance of the actual system needs to be determined through test experiments. Test experiments can be performed on a model test system or on a prototype prototype. Through testing experiments, some problems are often found and measures must be taken to solve them.
Eight, system design finalization
After the above 7 steps and the repeated results of the repeated results, the design scheme can be determined, and then the technical documents such as the design drawings and the design calculation specifications are prepared, and ready to be put into formal production.

72V Battery Pack ,Lithium Ion Battery Pack,Lithium Battery Pack,Battery Power Pack
Zhejiang Casnovo Materials Co., Ltd. , https://www.casnovo-new-energy.com